首页
论坛
博客
大讲堂
人才网
直播
资讯
技术文章
频道
登录
注册
x
车载雷达测试系统
2019-07-25 09:06:29
NI
点击关注->
创芯网公众号
,后台告知EETOP论坛用户名,奖励200信元
专为自动化设计验证、
测试
和
测量
而设计
NI车载雷达
测试
系统 (VRTS) 为76至81 GHz的
汽车
雷达系统提供了自动化雷达
测量
和障碍物模拟功能。工程师可利用VRTS来
测试
汽车
硬件及软件子系统,包括雷达传感器、ADAS子系统和嵌入式软件。VRTS具有灵活的障碍物生成功能,可模拟各种生成的场景,帮助工程师
测试
雷达及其他先进驾驶辅助系统 (ADAS) 的嵌入式软件。此外,高性能毫米波
射频
前端和PXI矢量信号收发器 (VST) 相结合,可实现精确的
RF
测量
,帮助工程师分析和
测试
波束。因此,工程师可以在ADAS和雷达系统开发的各个阶段,即从研发到批量制造
测试
,均使用相同的
测量
硬件。
VRTS是平台化
测试
和
测量
方法的一部分, 因此它可以轻松地与其他PXI
测量
硬件集成,以构成完整的
汽车
测试
系统。对于传感器融合
测试
应用,工程师可以将VRTS与其他
测量
硬件组合并同步,以同时模拟多种类型的传感器。
测试
系统通常作为硬件在环 (HIL) 仿真的一部分,通过模拟环境的行为来
测试
嵌入式软件。
VRTS详解
VRTS是一种模块化系统,能够在77和79 GHz
汽车
雷达波段内提供
汽车
雷达障碍物生成和
测量
功能。VRTS的核心是PXI系统,里面包含了PXIe-5840矢量信号收发器和NI-5692可变延迟发生器(VDG)。这些模块与NI mmRH-3608毫米波
射频
前端配合使用,可为雷达传感器提供
射频
接口。这款毫米波
射频
前端还具有对中激光器,可确保雷达DUT与
测试
系统
射频
前端之间精确对准。典型
测试
配置框图如图1所示。VRTS的一个关键组件是PXIe-5480 VST。该仪器为系统提供两个关键功能:校准雷达
测量
和障碍物模拟。工程师利用VST的板载
FPGA
, 可模拟雷达障碍物的复杂运动。执行雷达障碍物模拟时,VRTS最多可模拟四个或更多物体。如果障碍物出现在4到300m的距离内,则距离分辨率为10cm到12cm,距离越近分辨率越高。除距离外,用户可在软件中动态设置目标雷达截面 (RCS) 和速度(多普勒效应)。
图1.典型VRTS配置框图
VST的
射频
信号发生器和分析仪为自动化雷达传感器
测试
提供经过校准的
测量
结果。基于该仪器,VRTS可帮助工程师进行各种
测量
,包括天线波束辐射方向图、全向有效辐射功率(EIRP)、相位噪声、 频谱占有率、波束宽度、线性调频信号调制解调等。将障碍物模拟和
测量
功能集于一体,可减少总
测试
时间,而且也意味着您无需分别购买具有这两种功能的专用
测试
系统,这样可减少仪器数量,进而减少生产
测试
所需的占地空间。
VRTS的模块化特性使得NI联盟合作伙伴可定制硬件配置,来精准地满足特定应用的需求。
生产
测试
用9槽系统
对于生产
测试
应用,VRTS采用一个VST和最多两个VDG配置,如图2所示。该配置支持生成最多两个远距离雷达障碍物,而且占地面积和成本也保持最小。生产
测试
用的VRTS还具有全部的雷达
测量
功能,包括波束特征
测试
、EIRP
测量
和功能
测试
。图2 的系统配置包括:
1个PXIe-1078 9槽机箱
1个PXIe-8840多核嵌入式控制器
1个PXIe-5840矢量信号收发仪
2个NI-5692可变延迟发生器
图2.生产
测试
的VRTS配置
用于验证、特性分析和研发的18槽系统
对于高级应用,工程师可使用PXIe-1085 18 槽机箱来支持生成多达四个全范围雷达障碍物。该配置包括两个VST和四个VDG,如图3所示。无论是生产
测试
用VRTS, 还是高级应用所需的VRTS,均可通过扩展电缆连接至其他PXI机箱进行扩展,以生成更多模拟雷达障碍物。图3的系统配置包括:
1个PXIe-1085 18槽机箱
1个PXIe-8840多核控制器
2个PXIe-5840矢量信号收发仪
4个NI-5692可变延迟发生器
请注意,图3的配置还包含一个空PXI插槽,用于添加更多仪器或控制其他PXI机箱。适用的仪器包括
电源
、
示波器
、数据采集模块、CAN/以太网接口模块等。
图3.高级VRTS最多可生成四个雷达障碍物
毫米波
射频
前端选项
除了多种PXI配置外,VRTS还具有多个
射频
前端选项,适用于收发分置和收发一体天线配置。收发分置选项具有独立的接收和发射端口以及高达50 dB的收发隔离。而收发一体选项则只有一个混合信号收发端口,收发隔离最高达30 dB。收发分置
射频
前端如图4所示。
图4.收发分置VRTS毫米波收发器
射频
前端(带盖和不带盖)
雷达障碍物模拟
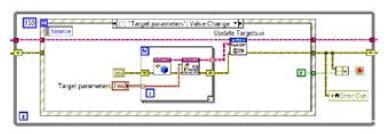
VRTS的灵活性可允许NI联盟伙伴高度定制软件应用程序,以精准满足特定应用的需求。NI联盟合作伙伴可利用LabVIEW和 LabVIEW
FPGA
所提供的强大图形化编程环境(图5所示),开发从独立障碍物模拟器到全功能HIL模拟系统等各种规模的软件应用程序。对于这些软件应用程序,NI联盟合作伙伴可基于底层VRTS硬件API,使用定制软件对其进行功能增强和扩展。
图5.使用LabVIEW和LabVIEW
FPGA
自定义
测量
和场景。
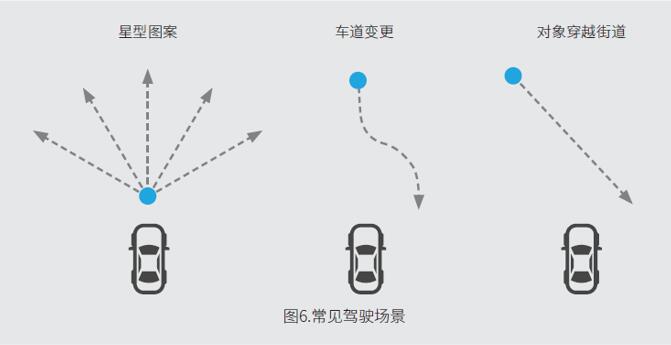
NI灵活的障碍物生成架构提供了一个显著优势:工程师可在可靠性标准和需求发生变化时增加新的
测试
用例。例如,在涉及嵌入式ADAS软件
测试
的应用中,工程师可以使用NI联盟合作伙伴的软件来模拟常见的驾驶场景,如图6所示,包括星型图案、车道变换和对象穿越街道。VRTS在这三个场景的行为均可通过三个关键参数进行控制; 距离、速度和雷达截面。
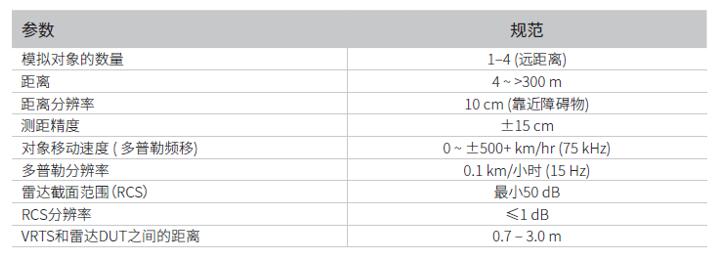
工程师可对VRTS进行各种配置,以模拟符合表1所列条件的各种障碍物。
表1.VRTS障碍物模拟规范
雷达
测试
和
测量
除了障碍物模拟之外,VRTS还可以对雷达传感器和系统进行
射频
测量
。NI VRTS的底层硬件控制还纳入了典型雷达
测量
所需的
测量
功能。这些
测量
功能均以NI-
RF
mx
测量
API为基础,可快速提供精确的
测量
结果。VRTS支持的典型
测量
包括:
辐射方向图
等效全向辐射功率(EIRP)
噪声
频谱占有率
波束宽度
线性调频分析:线性度、过冲、记录、标签
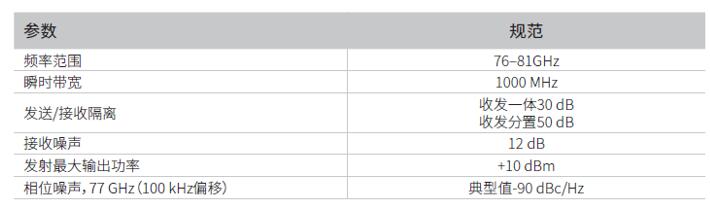
表2.VRTS硬件性能
关于NI
NI以软件为中心的平台集成了模块化硬件和庞大的生态系统,助力工程师和科学家应对各种挑战。 这一久经验证的方法可让用户完全自主地定义所需的一切来加速
测试
测量
和控制应用的系统设计。 NI解决方案可帮助用户构建超出预期的高性能系统,快速适应需求的变化,最终改善我们的生活。
关键词:
NI
毫米波
EETOP 官方微信
创芯大讲堂 在线教育
创芯老字号 半导体快讯
相关文章
上一篇:
是德科技 5G 测试解决方案赢得广和通
下一篇:
快速发展的航空航天和国防领域,如何提
0
全部评论
最新资讯
贸泽开售面向AI、工业、汽车、农业和医疗应
英特尔新篇章:重视工程创新、文化塑造与客
PTS845 轻触开关系列使用寿命延长至百万次
三进制涅槃重生!华为公布三进制逻辑门专利
消息称立讯精密拟赴港上市 计划融资 20-3
SU7碰撞爆燃致3人遇难!小米公布事件细节
贸泽电子开售Molex的航空航天解决方案
一文看透!俄罗斯首台光刻机的技术成色及现
碳化硅技术赋能EA10000系列电源的技术解析
大联大世平集团推出基于MemryX和瑞芯微产品
最热资讯
是德科技与三星联合展示基于 NVIDIA AI
使用分流电阻器测量电流
KLA-Tencor Corporation推出两款先进的量测系统
【测试案例分享】 Keithley电化学测试方法
柔性可穿戴电子设备材料的导电测试
安捷伦科技推出Agilent 6420三重串联四极
普源精电RIGOL推出MHO2000系列高分辨率示波器
OVTI推出新款极具成本效益的 1/7.5 英寸
泰克助力Magway打造零排放地下配送系统,引
泰克与远山半导体合作再结硕果,共推1700VG