首页
论坛
博客
大讲堂
人才网
直播
资讯
技术文章
频道
登录
注册
x
LIDAR感知挑战
2020-07-27 13:55:18
ADI
点击关注->
创芯网公众号
,后台告知EETOP论坛用户名,奖励200信元
成功的自动驾驶
汽车
必定将使用紧密集成的传感器系统来达到甚至超越人类的驾驶能力。人类驾驶员一般利用双眼、双耳,以及车辆运动给人的反馈来驾驶
汽车
。我们的大脑会实时处理所有这些信息,并从人脑的驾驶经验数据库中直觉反应。复现人类驾驶能力所需的传感器包括雷达、激光雷达(LIDAR)、摄像头、惯性
测量
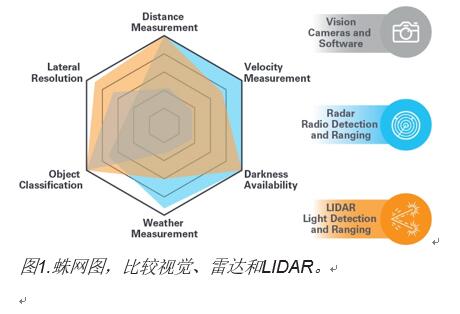
单元(IMU),以及超声波传感器。每种系统都有其优势,也有其缺点。单一传感器的精度和性性能不足以取代所有其他传感器相辅相成的多传感器融合是大趋势。本文将介绍与LIDAR有关的主要设计考量,LIDAR是一种传感器,为各种自动驾驶解决方案提供大量数据。
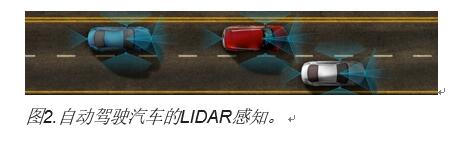
在自动驾驶
汽车
中,LIDAR与雷达密切合作。这两种技术在工作中不会产生可见光,这对于夜间驾驶或弱光条件至关重要。雷达适合远距离检测和跟踪,LIDAR则提供更高的角分辨率,可以识别对象并对其进行分类。换句话说,雷达适合检测对象是否存在,LIDAR则能够在雷达检测到对象的基础上提供关于该对象的具体信息。
设计LIDAR系统时会面临一些技术挑战,主要挑战之一就是近红外波长要保持在人眼安全限值之下。关于这些安全指南,请参考IEC 60825-1。这并不是要降低人眼安全的重要性,本文探讨的所有方面最终都会影响人眼安全。目前存在多种不同的LIDAR系统技术,设计复杂程度各不相同,各有其优点和缺点。
重要的是,所有设计需要关注的基础方面都相同。再此我们着重讨论人眼安全以外影响系统设计的其他方面,包括:SNR最大化、最小可检测要求、视场、散热、功耗,以及航位推测。
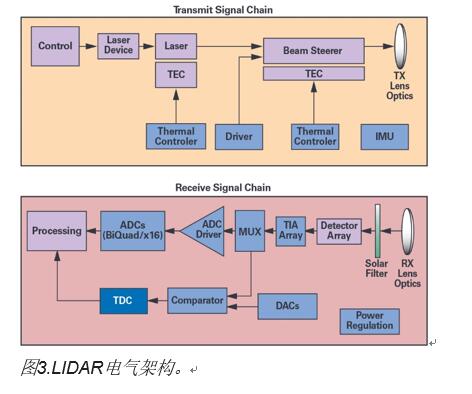
查看接收链路,会发现系统的信噪比(SNR)会影响在远距离(100米至300米)检测小型目标的能力。ADC噪底不能超过接收路径中的其他噪声源。如果背景光或散粒噪声贡献因素低于ADC的噪底或印刷电路板(PCB)噪声,系统精度就会受限。采用直接飞行时间(ToF)法要求系统可以输出短脉冲(~1 ns至5 ns),且使用高采样速率ADC检测这些脉冲。采样速率达到1 GSPS,即可满足接收信号链路需求。此外,请注意,ADC的有效位数(ENOB)必须支持跨阻放大器(TIA)的整个输出范围,不能对信号实施削波。
系统需要检测100米开外的篮球吗?确定相关对象的反射率、尺寸和距离,会决定TIA的SNR需求。与ADC相同, TIA也需要检测同样的窄脉冲。因为系统需要处理的对象的距离、反射率和尺寸范围甚广,所以TIA必须能够在饱和后中快速恢复。高反射(比如交通标志怕爱)或近距离目标能反射强光而造成TIA饱和,。这些都是常见事件,而系统恢复的速度(以尽量减少致盲时间)对于安全性至关重要。
系统的视场和角分辨率也会影响到检测一个篮球的能力。发射和接收光学是决定视场的主要因素。角分辨率决定您能远距离检测篮球大小的目标并进行分类,还是只能检测目标的存在。
对于LIDAR系统设计人员来说,处理这些系统的功耗和散热是不小的挑战。当然,降低信号链的功耗会相应降低产生的热量。组件在的性能随温度会出现大幅变化,其中更敏感的一些组件可能需要温度补偿。使用热电控制器是一种不错的方法,可以高度准确地对IC进行冷却或加热。如果追求精确的话,发光和感光二极管都需要温度补偿,以在LIDAR系统的工作温度范围内保持稳定的工作波长和效率。
在某些情况下,对雪崩光电二极管和激光器施加的偏置电压要到几百伏(正压或负压)。高效生成这些电压,且使用尽可能少的组件,是最佳设计实践所追求的。要提供准确的基准电压源,需要使用精密数模转换器(DAC)生成偏置点、电流和电压。沿着传统的1.8 V至12 V电压域,LIDAR系统对电压的需求是有所增加的。小心选择
电源
解决方案可以处理这一问题,尤其是解决方案中额外添加一种电压时。选择具备关断或低功率模式的IC和
电源
也非常重要,这样的系统可以灵活高能效地轮询多个通道。
集成LIDAR传感器的IMU具备多种优势。IMU传感器智能地融合多轴陀螺仪和加速度计,为除震和导航应用提供可靠的位置和运动识别。即使在复杂的操作环境下,面临极限运动动力学问题时,精密微机电系统(
MEMS
) IMU也能提供所需的精度。
IMU为自动驾驶系统提供航位推测、定位和稳定功能。反过来,在ADAS或GPS性能下降,或者不可用时,上述功能又能为系统提供可靠的数据。IMU能够有效利用高更新速率(每秒数千个样本),且可以不受外部环境变化干扰。IMU越稳定,越能长时间为系统提供关键且可靠的航迹信息。
IMU可以直接集成到LIDAR模块中,用于检测、分析和纠正车辆运行环境中常见的振动。例如,IMU输出可辅助拼接LIDAR点云,否则,这些点云会因为车辆越过路面坑洼而出现偏离。此外,还可以使用IMU检测旋转式LIDAR系统的轴承磨损,以在实际出现故障之前维修LIDAR,提高安全性。
结论
在最初产品定义期间,需要考虑LIDAR系统的复杂性,以确定可接受的SNR、检测要求、视野、散热限制以及功耗。了解哪些组件是各个问题的主要贡献因素,同时谨慎选择IC,可以大大提高设计的成功几率。
作者简介
Sarven Ipek于2006年加入ADI公司。在ADI公司任职期间,Sarven在故障分析、设计、特性表征、产品工程、项目管理和程序管理方面积累了丰富的经验。Sarven目前是ADI公司麻萨诸塞州威明顿市自动驾驶和安全产品部门LIDAR部的营销经理。
他拥有东北大学电气和计算机工程学士学位以及电气工程硕士学位,主修通信系统和信号处理。
关键词:
LIDAR
ADI
自动驾驶
EETOP 官方微信
创芯大讲堂 在线教育
创芯老字号 半导体快讯
相关文章
上一篇:
英伟达与佛罗里达大学联手打造高等教育
下一篇:
外媒:特斯拉计划在柏林生产车用电池,
全部评论
最新资讯
SU7碰撞爆燃致3人遇难!小米公布事件细节
贸泽电子开售Molex的航空航天解决方案
一文看透!俄罗斯首台光刻机的技术成色及现
碳化硅技术赋能EA10000系列电源的技术解析
大联大世平集团推出基于MemryX和瑞芯微产品
英特尔CEO陈立武:必须弥补人才流失!
普源精电RIGOL推出MHO2000系列高分辨率示波器
功率电子材料新突破!西湖大学工学院孔玮团
华为发债80亿!
突发!美的集团清仓小米股票!
最热资讯
英特尔AI Assistant Builder 让数月开发
约11万元/颗!英伟达降速版AI芯片价格曝光
无人驾驶现在到了什么级别了?
DeepSeek估值大幅飙涨,梁文峰身价或超过黄
国产X86 CPU+国产GPU+国产大模型DeepSeek
国外AI专家深度剖析:盛赞DeepSeek R1里程
Meta Quest 2 / 3 / Pro头显HDMI Li
浅析狭义AI 、通用AI 与超级AI
Cadence发布全新Celsius Studio AI热分析
上海明星AI公司裁员停薪!